The Advanced Learning & Perception System(先进学习与感知系统,ALPS) Lab was founded by Dr. Xiaobo Chen. The ALPS Lab is dedicated to developing and applying a variety of machine learning/deep learning methods for traffic information sensing and control. Our goal is to advocate green, economic, efficient, safe and comfortable transportation system to achieve smart city by leveraging cutting-edge artificial intelligence and cloud/edge computing techniques.
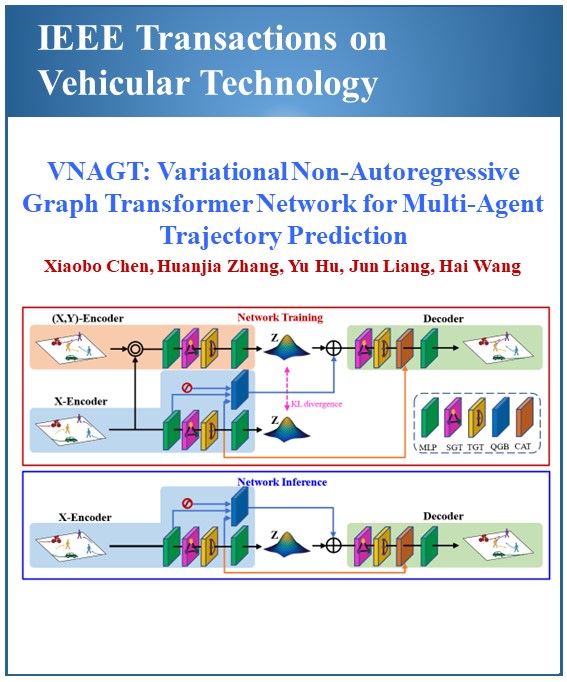
One paper about vehicle re-identification was accepted by IEEE Transactions on Vehicular Technology (智能车领域顶级期刊,中科院2区TOP,IF: 6.23) link
03/2024
One paper about pedestrian crossing intent prediction was accepted by IEEE Transactions on Intelligent Transportation Systems (智能交通领域顶级期刊,中科院1区TOP,CCF-B) link
One paper about driving behavior recognition was accepted by IEEE Internet of Things Journal (物联网领域顶级期刊,中科院1区TOP,IF: 10.6) link
10/2023
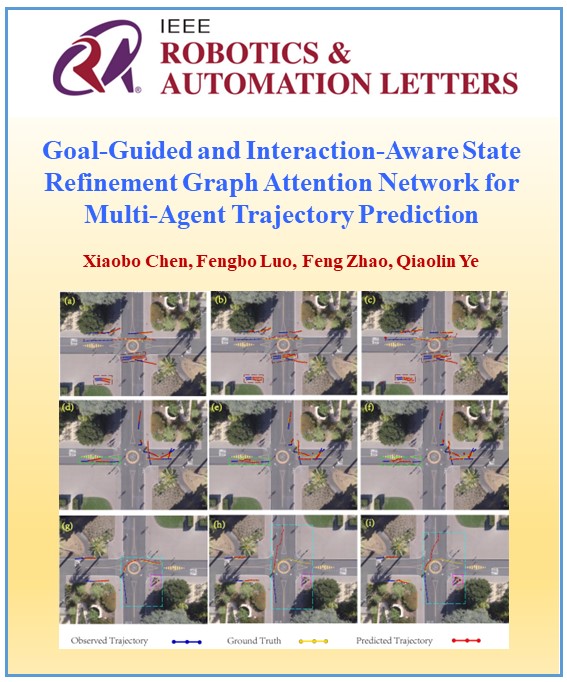
One paper about pedestrian trajectory prediction was accepted by IEEE Robotics and Automation Letters (机器人领域权威期刊,中科院2区) link
10/2023
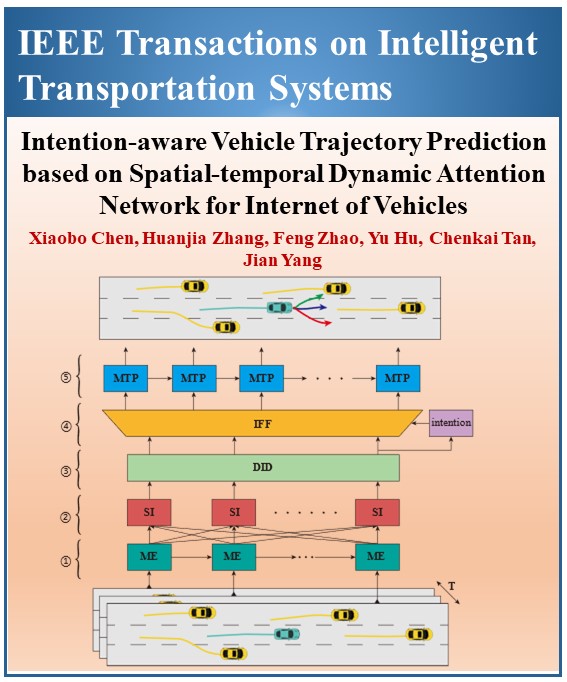
One paper about stochastic multi-agent trajectory prediction was accepted by IEEE Transactions on Intelligent Transportation Systems (智能交通领域顶级期刊,中科院1区TOP,CCF-B) link
I accept the invitation to serve on the technical program committee (TPC) for 2023 IEEE International Conference on Communications (ICC): SAC Machine Learning for Communications and Networking Track link
07/2022
I accept the invitation to serve as guest editor for a special issue of Frontiers in Psychology (JCR 2区). Welcome paper submission, 欢迎投稿! link
07/2022
Prof. Xiaobo Chen has been elevated to Senior Member of IEEE(通过严格评审与选拔,陈小波教授晋升为国际电气与电子工程师协会高级会员)
06/2022
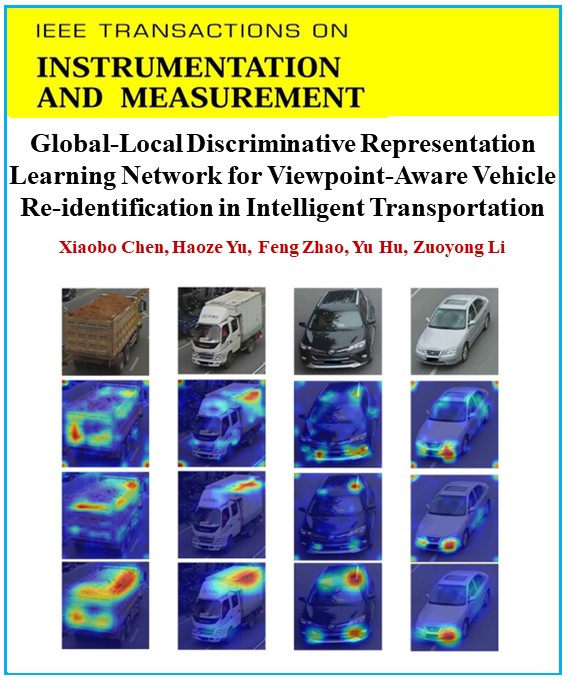
One paper about non-autoregressive vehicle trajectory prediction was accepted by IEEE Transactions on Instrumentation and Measurement (国际著名期刊,JCR 1区,中科院2区,IF: 5.33) link
04/2022
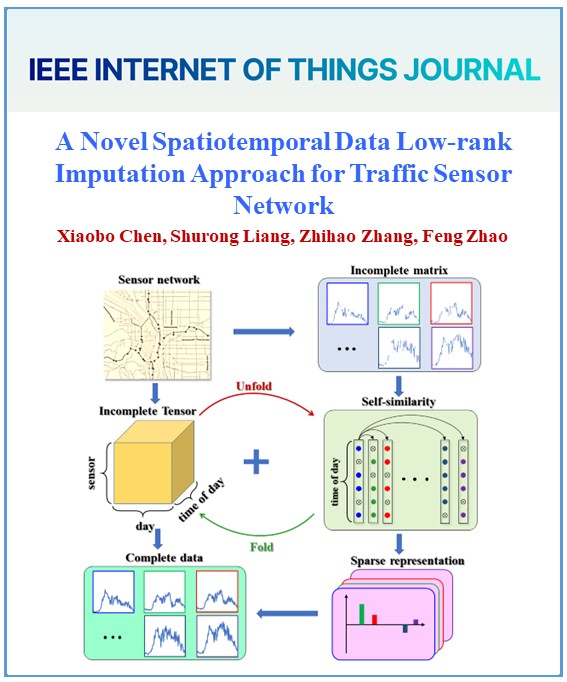
One paper about traffic sensor network missing data imputation was accepted by IEEE Internet of Things Journal (物联网领域顶级期刊,中科院1区TOP,IF: 10.23) link
04/2022
One paper about vehicle trajectory prediction was accepted by IEEE Transactions on Intelligent Transportation Systems (智能交通领域顶级期刊,中科院1区TOP,IF: 9.55,CCF-B类) link
03/2022
One paper about vehicle trajectory prediction was accepted by ICPR 2022


{kind=link}